Индукционный датчик своими руками
Индукционный датчик своими руками — Пожарная безопасность
Индуктивный датчик приближения. Внешний вид
В промышленной электронике индуктивные, оптические и другие датчики применяются очень широко.
Долго и постоянно имею с ними дело, и вот решил написать статью, поделиться знаниями.
Статья будет обзорной (если хотите, научно-популярной). Приведены реальные инструкции к датчикам и ссылки на примеры.
Виды датчиков
Итак, что вообще такое датчик. Датчик – это устройство, которое выдаёт определённый сигнал при наступлении какого-либо определённого события. Иначе говоря, датчик при определённом условии активируется, и на его выходе появляется аналоговый (пропорциональный входному воздействию) или дискретный (бинарный, цифровой, т.е. два возможных уровня) сигнал.
Точнее можем посмотреть в Википедии: Датчик (сенсор, от англ. sensor) — понятие в системах управления, первичный преобразователь, элемент измерительного, сигнального, регулирующего или управляющего устройства системы, преобразующий контролируемую величину в удобный для использования сигнал.
Там же и много другой информации, но у меня своё, инженерно-электронно-прикладное, видение вопроса.
Датчиков бывает великое множество. Перечислю лишь те разновидности датчиков, с которыми приходится сталкиваться электрику и электронщику.Индуктивные. Активируется наличием металла в зоне срабатывания. Другие названия – датчик приближения, датчик положения, индукционный, датчик присутствия, индуктивный выключатель, бесконтактный датчик или выключатель. Смысл один, и не надо путать. По-английски пишут “proximity sensor”. Фактически это – датчик металла.
Оптические. Другие названия – фотодатчик, фотоэлектрический датчик, оптический выключатель. Такие применяются и в быту, называются “датчик освещённости”
Емкостные. Срабатывает на наличие практически любого предмета или вещества в поле активности.
Давления. Давления воздуха или масла нет – сигнал на контроллер или рвёт аварийную цепь. Это если дискретный. Может быть датчик с токовым выходом, ток которого пропорционален абсолютному давлению либо дифференциальному.
Концевые выключатели (электрический датчик). Это обычный пассивный выключатель, который срабатывает, когда на него наезжает или давит объект.
Датчики могут называться также сенсорами или инициаторами.
Пока хватит, перейдём к теме статьи.
Принцип работы индуктивного датчика
Индуктивный датчик является дискретным. Сигнал на его выходе появляется, когда в заданной зоне присутствует металл.
В основе работы датчика приближения лежит генератор с катушкой индуктивности. Отсюда и название. Когда в электромагнитном поле катушки появляется металл, это поле резко меняется, что влияет на работу схемы.
Поле индукционного датчика. Металлическая пластина меняет резонансную частоту колебательного контура
И схема, содержащая компаратор, выдаёт сигнал на ключевой транзистор или реле. Нет металла – нет сигнала.
Схема индуктивного npn датчика. Приведена функциональная схема, на которой: генератор с колебательным контуром, пороговое устройство (компаратор), выходной транзистор NPN, защитные стабилитрон и диоды
Большинство картинок в статье – не мои, в конце можно будет скачать источники.
Применение индуктивного датчика
Индуктивные датчики приближения применяются широко в промышленной автоматике, чтобы определить положение той или иной части механизма. Сигнал с выхода датчика может поступать на вход контроллера, преобразователя частоты, реле, пускателя, и так далее. Единственное условие – соответствие по току и напряжению.
А что там свежего в группе вк самэлектрик.ру?
Работа индуктивного датчика. Флажок движется вправо, и когда достигает зоны чувствительности датчика, датчик срабатывает.
Кстати, производители датчиков предупреждают, что не рекомендуется подключать непосредственно на выход датчика лампочку накаливания. О причинах я уже писал – ток при включении лампы значительно превышает номинальный.
Характеристики индуктивных датчиков
Чем отличаются датчики.
Почти всё, что сказано ниже, относится не только к индуктивным, но и к оптическим и ёмкостным датчикам.
Конструкция, вид корпуса
Тут два основных варианта – цилиндрический и прямоугольный. Другие корпуса применяются крайне редко. Материал корпуса – металл (различные сплавы) или пластик.
Диаметр цилиндрического датчика
Основные размеры – 12 и 18 мм. Другие диаметры (4, 8, 22, 30 мм) применяются редко.
Чтобы закрепить датчик 18 мм, нужны 2 ключа на 22 или 24 мм.
Расстояние переключения (рабочий зазор)
Это то расстояние до металлической пластины, на котором гарантируется надёжное срабатывание датчика. Для миниатюрных датчиков это расстояние – от 0 до 2 мм, для датчиков диаметром 12 и 18 мм – до 4 и 8 мм, для крупногабаритных датчиков – до 20…30 мм.
Количество проводов для подключения
Подбираемся к схемотехнике.
2-проводные. Датчик включается непосредственно в цепь нагрузки (например, катушка пускателя). Так же, как мы включаем дома свет. Удобны при монтаже, но капризны к нагрузке. Плохо работают и при большом, и при маленьком сопротивлении нагрузки.
2-проводный датчик. Схема включения
Нагрузку можно подключать в любой провод, для постоянного напряжения важно соблюдать полярность. Для датчиков, рассчитанных на работу с переменным напряжением – не играет роли ни подключение нагрузки, ни полярность. Можно вообще не думать, как их подключать. Главное – обеспечить ток.
3-проводные. Наиболее распространены. Есть два провода для питания, и один – для нагрузки. Подробнее расскажу отдельно.
4- и 5-проводные. Такое возможно, если используется два выхода на нагрузку (например, PNP и NPN (транзисторные), или переключающие (реле). Пятый провод – выбор режима работы или состояния выхода.
Виды выходов датчиков по полярности
У всех дискретных датчиков может быть только 3 вида выходов в зависимости от ключевого (выходного) элемента:
Релейный. Тут всё понятно. Реле коммутирует необходимое напряжение либо один из проводов питания.
При этом обеспечивается полная гальваническая развязка от схемы питания датчика, что является основным достоинством такой схемы.
То есть, независимо от напряжения питания датчика, можно включать/выключать нагрузку с любым напряжением. Используется в основном в крупногабаритных датчиках.
Транзисторный PNP. Это – PNP датчик. На выходе – транзистор PNP, то есть коммутируется “плюсовой” провод. К “минусу” нагрузка подключена постоянно.
Транзисторный NPN. На выходе – транзистор NPN, то есть коммутируется “минусовой”, или нулевой провод. К “плюсу” нагрузка подключена постоянно.
Можно чётко усвоить разницу, понимая принцип действия и схемы включения транзисторов. Поможет такое правило: Куда подключен эмиттер, тот провод и коммутируется. Другой провод подключен к нагрузке постоянно.Ниже будут даны схемы включения датчиков, на которых будет хорошо видно эти отличия.
Виды датчиков по состоянию выхода (НЗ и НО)
Какой бы ни был датчик, один из основных его параметров – электрическое состояние выхода в тот момент, когда датчик не активирован (на него не производится какое-либо воздействие).
Выход в этот момент может быть включен (на нагрузку подается питание) либо выключен. Соответственно, говорят – нормально закрытый (нормально замкнутый, НЗ) контакт либо нормально открытый (НО) контакт. В иностранной аппаратуре, соответственно – NС и NО.
То есть, главное, что надо знать про транзисторные выходы датчиков – то, что их может быть 4 разновидности, в зависимости от полярности выходного транзистора и от исходного состояния выхода:
- PNP NO
- PNP NC
- NPN NO
- NPN NC
Контакты датчиков также могут быть с задержкой включения или выключения. Про такие контакты также сказано в статье про приставки выдержки времени ПВЛ. А почему датчики, отвечающие за безопасность, должны быть обязательно с НЗ контактами – см. статью про Цепи безопасности в промышленном оборудовании.
Кстати, если Вам вообще интересно то, о чем я пишу, подписывайтесь на получение новых статей и вступайте в группу в ВК!
Положительная и отрицательная логика работы
Это понятие относится скорее к исполнительным устройствам, которые подключаются к датчикам (контроллеры, реле).
ОТРИЦАТЕЛЬНАЯ или ПОЛОЖИТЕЛЬНАЯ логика относится к уровню напряжения, который активизирует вход.
ОТРИЦАТЕЛЬНАЯ логика: вход контроллера активизируется (логическая “1”) при подключении к ЗЕМЛЕ. Клемму S/S контроллера (общий провод для дискретных входов) при этом необходимо соединить с +24 В=. Отрицательная логика используется для датчиков типа NPN.
ПОЛОЖИТЕЛЬНАЯ логика: вход активизируется при подключении к +24 В=. Клемму контроллера S/S необходимо соединить с ЗЕМЛЕЙ. Используйте положительную логику для датчиков типа PNP. Положительная логика применяется чаще всего.
Индуктивные датчики. Виды. Устройство. Параметры и применение
Индуктивные датчики – преобразователи параметров. Их работа заключается в изменении индуктивности путем изменения магнитного сопротивления датчика.
Большую популярность индуктивные датчики получили на производстве для измерения перемещений в интервале от 1 микрометра до 20 мм.
Индуктивный датчик можно применять для замера уровней жидкости, газообразных веществ, давлений, различных сил.
В этих случаях диагностируемый параметр преобразуется чувствительными компонентами в перемещение, далее эта величина поступает на индуктивный преобразователь.
Индукционный датчик своими руками — Справочник металлиста
Индуктивные датчики – преобразователи параметров. Их работа заключается в изменении индуктивности путем изменения магнитного сопротивления датчика.
Большую популярность индуктивные датчики получили на производстве для измерения перемещений в интервале от 1 микрометра до 20 мм.
Индуктивный датчик можно применять для замера уровней жидкости, газообразных веществ, давлений, различных сил.
В этих случаях диагностируемый параметр преобразуется чувствительными компонентами в перемещение, далее эта величина поступает на индуктивный преобразователь.
Для замера давления применяются чувствительные элементы. Они играют роль датчиков приближения, предназначенные для выявления разных объектов бесконтактным методом.
Индуктивные датчики разделяются по схеме построения на 2 вида:
- Одинарные датчики.
- Дифференциальные датчики .
Первый вид модели имеет одну ветвь измерения, в отличие от дифференциального датчика, у которого две измерительные ветви.
В дифференциальной модели при изменении диагностируемого параметра изменяются индуктивности 2-х катушек. При этом изменение осуществляется на одинаковое значение с противоположным знаком.
Индуктивность катушки вычисляется по формуле: L = WΦ/I
Где W– количество витков; Ф – магнитный поток; I – сила тока, протекающего по катушке. Сила тока взаимосвязана с магнитодвижущей силой следующим отношением: I = Hl/W
Из этой формулы получаем: L = W²/Rm
Где R m = H*L/Ф – магнитное сопротивление.
Работа одинарного датчика заключается в свойстве дросселя, изменять индуктивность при увеличении или уменьшении воздушного промежутка.
Конструкция датчика включает в себя ярмо (1), витки обмотки (2), якорь (3), который фиксируется пружинами. По сопротивлению поступает переменный ток на обмотку. Сила тока в нагрузочной цепи вычисляется:
L – индуктивность датчика, rd – активное дроссельное сопротивление.
Оно является постоянной величиной, поэтому изменение силы тока I может осуществляться только путем изменения составляющей индуктивности XL=IRн, зависящей от размера воздушного промежутка δ.Каждой величине зазора соответствует некоторое значение тока, определяющего падение напряжения на резисторе Rн: Uвых=I*Rн – является сигналом выхода датчика.
Можно определить следующую зависимость U вых = f (δ), при одном условии, что зазор очень незначительный и потоки рассеивания можно не учитывать, как и магнитное сопротивление металла Rмж в сравнении с магнитным сопротивлением зазора воздуха Rмв.
Из недостатков одинарных можно отметить:
- При эксплуатации датчика на якорь воздействует сила притяжения к сердечнику. Эта сила не уравновешена никакими методами, поэтому она снижает точность функционирования датчика, и вносит некоторый процент погрешности.
- Сила нагрузочного тока зависит от амплитуды напряжения и ее частоты.
- Чтобы измерить перемещение в двух направлениях, нужно установить первоначальное значение зазора, что доставляет определенные неудобства.
Дифференциальные индуктивные датчики объединяют в себе два нереверсивных датчика и изготавливаются в виде некоторой системы, которая состоит из 2-х магнитопроводов, имеющих два отдельных источника напряжения.
Для этого чаще всего применяется разделительный трансформатор (5).
Дифференциальные датчики классифицируются по форме сердечника:
- Индуктивные датчики с Ш-образной формой магнитопровода, выполненного в виде листов электротехнической стали. При частоте более 1 килогерца для сердечника используют пермаллой.
- Цилиндрические индуктивные датчики с круглым магнитопроводом.
Форму датчика выбирают в зависимости от конструкции и ее сочетания с механизмом.
Использование магнитопровода Ш-образной формы является удобным для сборки катушки и снижения габаритных размеров индуктивного датчика.
Для функционирования дифференциального датчика применяют питание от трансформатора (5), который имеет вывод от средней точки. Между этим выводом и общим проводом катушек подключают прибор (4). При этом воздушный промежуток находится в пределах от 0,2 до 0,5 мм.
При расположении якоря в средней позиции при равных промежутках индуктивные сопротивления обмоток (3 и 3′) равны. Значит, значения токов катушек также одинаковы, и общий полученный ток в устройстве равен нулю.
При малом отклонении якоря в любую сторону изменяется значение воздушных промежутков и индуктивностей.
Поэтому прибор определяет ток разности I1-I2, который определен функцией перемещения якоря от средней позиции.
Разность токов чаще всего определяется магнитоэлектрическим устройством (4), выполненным по типу микроамперметра со схемой выпрямления (В) на входе.
Полярность тока не зависит от изменения общего сопротивления катушек. При применении фазочувствительных схем выпрямления можно определить направление перемещения якоря от средней позиции.
Параметры
- Одним из параметров индуктивных датчиков является диапазон срабатывания. По этому параметру выбирают датчики, однако он не настолько важен. В инструкции по датчику даны номинальные параметры питания при эксплуатации устройства при температуре +20 градусов. Постоянное напряжение для датчика – 24 В, а переменное 230 В. Обычно датчик работает в совершенно других условиях.
На практике при подборе датчика важны два показателя интервала срабатывания:
Показания первого вычисляются как +10% от 2-го при температуре 25-70 градусов. Показания 2-го отличаются от номинала на 10%. Интервал температуры при этом увеличивается с 18 до 28 градусов. Если при втором параметре применяется номинальное напряжение, то при первом есть разброс 85-110%.
- Другим параметром является гарантированный предел срабатывания. Он колеблется от нуля до 81% от номинала.
- Также следует учитывать параметры: повторяемость и гистерезис, который равен расстоянию между конечными позициями работы датчика. Его оптимальная величина равна 20% от эффективного интервала срабатывания.
- Нагрузочный ток. Изготовители иногда производят датчики специального исполнения на 500 миллиампер.
- Частота отклика. Этот параметр определяет наибольшую величину возможности переключения в герцах. Основные промышленные датчики имеют частоту отклика 1000 герц.
Методы подключения на схемах
Имеется несколько видов индуктивных датчиков с различным числом проводов для подключения. Рассмотрим основные виды подключений разных индуктивных датчиков.
- Двухпроводные индуктивные датчики подключаются непосредственно в нагрузочную цепь. Это наиболее простой способ, однако в нем есть особенности. Для такого способа для нагрузки требуется номинальное сопротивление. Если это сопротивление будет больше или меньше, то устройство функционирует некорректно. При включении датчика на постоянный ток нельзя забывать о полярности выводов.
- Трехпроводные индуктивные датчики наиболее популярны. В них имеется два проводника для подключения питания, а один для нагрузки.
- Четырехпроводные и пятипроводные индуктивные датчики. У них два провода на питание, другие два на нагрузку, пятый проводник для выбора режима эксплуатации.
Цветовая маркировка
Маркировка проводников цветом является очень удобной для осуществления обслуживания и монтажа датчиков. Их выходные проводники промаркированы определенным цветом:
- Минус – синий.
- Плюс – красный.
- Выход – черный цвет.
- Второй проводник выхода – белый цвет.
Погрешности
Погрешность преобразования диагностируемого параметра влияет на способность выдачи информации индуктивным датчиком. Суммарная погрешность состоит из множества различных погрешностей. Рассмотрим основные виды погрешностей датчиков.
- Электромагнитная погрешность является случайной величиной. Она появляется вследствие индуцирования ЭДС в катушке датчика наружными магнитными полями. На производстве возле силовых электрических устройств существуют магнитные поля чаще всего частотой 50 герц.
- Погрешность от температуры также является случайным значением, так как работа большого количества элементов датчика зависит от температуры и является значительной величиной, учитываемой при проектировании датчиков.
- Погрешность магнитной упругости. Она появляется от нестабильности деформаций сердечника при сборке прибора, а также из-за изменения деформаций при работе. Влияние нестабильности напряжений в магнитопроводе образует нестабильность сигнала на выходе.
- Погрешности устройства появляются по причине влияния измеряющей силы на деформации элементов датчика, а также влияния скачка усилия измерения на нестабильность деформации. Также на погрешность влияют люфты и зазоры в подвижных частях конструкции датчика.
- Погрешность кабеля образуется от непостоянной величины сопротивления, деформации кабеля и его температуры, наводок электродвижущей силы в кабеле от внешних полей.
- Тензометрическая погрешность случайная величина и зависит от качества намотки витков провода. При намотке возникают механические напряжения, изменение которых при функционировании датчика приводит к изменению сопротивления обмотки постоянному току, а значит, изменению сигнала на выходе. Чаще всего в качественных датчиках эту погрешность не учитывают.
- Погрешность старения датчика появляется от износа движущихся частей устройства датчика, а также постоянного изменения электромагнитных свойств магнитопровода. Такую погрешность считают также случайным значением. При определении погрешности износа учитывается кинематика устройства датчика. При проектировании датчика рекомендуется определять его срок эксплуатации в нормальном режиме, за период которого погрешность от износа не превзойдет заданного значения.
- Погрешность технологии появляется при отклонениях от техпроцесса изготовления датчика, разброса параметров катушек и элементов при сборке, от влияния натягов и зазоров при сопряжении деталей. Оценка погрешности технологии производится простыми механическими измерителями.
Электромагнитные параметры материалов и их свойства со временем меняются. Чаще всего процессы изменения свойств материалов происходят в первые 200 часов после термообработки сердечника магнитопровода. Далее эти свойства остаются теми же, и не влияют на полную погрешность датчика.
Достоинства
- Большая чувствительность.
- Повышенная мощность выхода, до нескольких десятков Вт.
- Возможность подключения к промышленным источникам частоты.
- Прочное и простое устройство.
- Нет трущихся контактов.
Индуктивный датчик: виды, принцип работы, схема подключения, как проверить
Работа на промышленных предприятиях требует внедрения автоматической системы управления. С этой целью применяется разное оборудование, способное обеспечить бесперебойное функционирование производственных машин.
Для контроля металлических объектов не редко используют бесконтактные индуктивные датчики, обладающие как положительными, так и отрицательными качествами.
Но главное, что они отличаются небольшими размерами и прекрасно выполняют возложенные функции, поэтому пользуются популярностью и у производителей бытовой и даже медицинской техники.
Общее описание и назначение
Индуктивным датчиком принято называть устройство, способное преобразовывать механические перемещений контролируемых объектов в электрический сигнал.
Представляет собой одну или несколько катушек индуктивности, объединенных с магнитопроводом и подвижным якорем, который регистрирует измерения линейного или углового размера и, перемещаясь, влияет на показатель индуктивности, изменяя ее в одну или другую сторону.
Благодаря такой особенности, бесконтактные датчики активно используются в качестве элементов контроля положения металлических объектов.
Виды
По схеме построения индукционные датчики принято разделять только на 2 отдельных вида: одинарные и дифференцированные.
Одинарные
Устройства только с одним магнитопроводом. Такая схема обычно применяется при разработке бесконтактных выключателей.
Дифференциальные
Отличаются наличием сразу 2-ух магнитопроводов, каждый из которых специально сделанных в виде «ш». Это позволяет взаимокомпенсировать воздействие, оказываемое на сердечник, повышая таким образом точность производимых измерений. По сути, схема представляет из себя систему из 2-ух датчиков, соединенных общим якорем.
Устройство и схема
Индукционный датчик, как и любое электронное устройство, состоит из связанных друг с другом узлов, обеспечивающих бесперебойность его работы. В качестве основных элементов аппарата можно выделить следующее.
Генератор
Ключевой задачей генератора является создание магнитного поля, на основе которого, в частности, строится принцип действия индукционного датчика, а также образуются зоны активности с объектом.
Триггер Шмидта
Триггер Шмидта представляет собой отдельный элемент, основным назначением которого считается обеспечение гистерезиса в процессе переключения устройства.
Усилитель
Усилительное устройство используется в качестве элемента, способного повышать значение амплитуды импульса, что позволяет сигналу быстрее достигать необходимого параметра.
Специальный индикатор
Диодный индикатор, свидетельствующий о фактическом состоянии контроллера. Кроме того, светодиод используется для обеспечения достаточного контроля функционирования индукционного датчика, а также, чтобы обеспечить достаточную оперативность в процессе настройки.
Компаунд
Компаунд предназначается для защиты устройства, поскольку может предотвратить попадание жидкости, в частности воды, внутрь корпуса индукционного датчика, а также снижает риск загрязнения оборудования, так как пыль может спровоцировать его поломку.
Принцип работы
Принцип действия основывается на изменениях амплитудного значения колебаний генераторного узла при попадании в активную зону устройства объекта определенных размеров.
В процессе подачи электропитания на концевик оборудования в районе его чувствительной части формируется изменяющееся магнитное поле.
Оно наводит в находящемся в рабочей зоне датчика материале вихревые токи, ведущие к изменению амплитуды электромагнитных колебаний.
В результате начнет вырабатываться выходной сигнал, который в процессе может изменяться в зависимости от фактического расстояния между устройством и объектом контроля.
Параметры
Чтобы контролировать функциональность индукционного датчика, а также определять уровень его сигналов, надо разбираться в параметрах устройства.
Напряжение питания
Представляет собой диапазон допустимого напряжения, в рамках которого устройство работает корректно.
Минимальный ток переключения
Это минимально возможное значение электрического тока, которое обязательно должно поступать к датчику для обеспечения его работы.
Рабочие расстояния
Это максимально допустимое расстояние от устройства до железного квадрата миллиметровой толщины. При этом данное значение уменьшается, если используется другой материал.
Частота переключения
Это максимально возможное количество переключений, которые можно сделать в течение одной секунды.
Способ подключения
Вариант подключения любого бесконтактного датчика зависит от примененной в процессе его производства схемы построения.
Трехпроводные
Трехпроводные имеют 3 проводника, 2 из которых предназначаются для обеспечения устройства питанием, а третий применяется для подключения к нагрузке. Она, в зависимости от использованной при разработке структуры, может подсоединяться к аноду либо катоду источника напряжения электрического тока.
Четырехпроводные
Четырехпроводные индукционные датчики отличаются наличием четырех проводников: 2 провода идут на питание, а другие 2 — на загрузку.
Двухпроводные
Двухпроводные устройства подключаются прямо в нагрузочную цепь. Это самый элементарный вариант, но и он обладает отдельными особенностями. Данный способ для нагрузки требует номинальное сопротивление, если же его значение окажется больше или меньше, тогда индукционный датчик не сможет корректно работать.
Внимание! При подключении устройства к источнику постоянного тока следует помнить о полярности выводов.
Пятипроводные
Пятипроводной отличается от четырехпроводного только наличием пятого проводника, который позволяет выбирать режим работы устройства.
Цветовая маркировка
Все электротехническое оборудование, в том числе проводники, обязательно имеет цветовую маркировку. Ее принято наносить для удобства последующих монтажных работ и дальнейшего обслуживания. Это правило должно соблюдаться и в случае с индукционными датчиками. Их выходные проводники маркируются следующими цветами:
- минус обычно указывается синим;
- плюс — красным;
- выход — черным;
- белый — дополнительный выход или же вход управления, что определяется типом используемого датчика.
Погрешности
Погрешности в процессе преобразования диагностических значений оказывают влияние на способности индукционных датчиков выдавать достоверную информацию. К основным из них можно отнести следующие.
Электромагнитная
Данную погрешность принято учитывать только в качестве случайной величины. Как правило, она возникает в ходе индуцирования ЭДС в индукционной катушке в результате внешнего воздействия сторонними магнитными полями. Это происходит в процессе производства из-за силовых электроустройств. Они образуют магнитные поля, что впоследствии и формирует электромагнитную погрешность.
От температуры
Эта погрешность тоже выступает в качестве случайного значения, поскольку работа большого числа элементов индукционного датчика напрямую зависит от температурных показателей, поэтому это ключевая величина, которая даже учитывается в процессе проектировки подобного оборудования.
Магнитной упругости
Обычно такая погрешность может проявляться как следствие нестабильности деформации магнитопровода устройства в процессе сборки самого датчика, а также при деформационных изменениях во время работы. Кроме того, оказываемое нестабильным электронапряжением воздействие на магнитопровод оборудования вызывает снижение качества передаваемого сигнала на выходе.
Деформация элементов
Данная погрешность, как правило, проявляется в результате воздействия измеряющей силы на значение деформации частей индукционного датчика, а также под влиянием усилий, оказываемых на нестабильные деформирующие процессы. Кроме того, не меньшее влияние на нее могут оказывать люфты и зазоры, образовавшиеся в подвижных элементах конструкции устройства.
Кабеля
Такая погрешность обычно проявляется от непостоянного значения сопротивления, в случае деформации самого провода и под влиянием температуры. Также подобным образом может сказаться наводка внешними полями ЭДС в кабеле.
Старение
Данная погрешность может проявляться при износе движущихся элементов самого устройства, а также в случае постоянно изменяющихся магнитных свойств используемого магнитопровода. Ее принято считать, строго говоря, случайным значением.
В процессе определения данной погрешности учитывают кинематику конструкции индукционного датчика, а во время проектирования подобного оборудования максимальный эксплуатационный срок рекомендуется определять только при работе в обычном режиме, чтобы при этом износ не успел превысить установленного значения.
Технологии
Погрешности технологии проявляются в случае отклонений от технического процесса производства, при явном разбросе технических параметров катушек и остальных элементов во время сборки, влиянии допущенных зазоров при соединении устройства. Для ее измерения принято использовать механическое измерительное оборудование.
Сферы использования
Возможная область применения индукционных датчиков настолько велика, что позволяет использовать их не только в быту и автомобилестроении, но и в промышленности с робототехникой, а также медицине.
Медицинские аппараты
Индуктивные датчики широко используются при производстве медицинского оборудования, поскольку магнитные свойства устройства позволяют регистрировать легочную вентиляцию, параметры вибрации, а также снимать баллистокардиограммы.
Бытовая техника
В бытовом плане датчики могут выступать в качестве приспособления контроля водоснабжения, уровня освещения и положения двери (закрыта или открыта), поэтому используются при производстве, к примеру, стиральных машин и другой бытовой техники. Кроме того, устройства применяются в процессе создания элементов «умного дома».
Автомобильная промышленность
Используется индукционный датчик и в автостроении, выступая в роли контроллера, определяющего положение коленчатого вала. При приближении металлического объекта, в данном случае, зуба шестерни, к устройству, генерируемое встроенным постоянным магнитом магнитное поле увеличивается, что приводит к наведению в катушке переменного напряжения.
Внимание! Некоторые производители для повышения эффективности стараются изменить конструкцию индукционного датчика, к примеру, используя внешние магниты для его активации.
Робототехническое оборудование
В случае с робототехникой, индуктивным датчикам нашли применение в производстве беспилотных аппаратов и промышленных роботов для повышения их чувствительности к препятствиям и способности распознавать объекты, а также устройствах, для которых важна самобалансировка.
Промышленная техника регулирования и измерения
Широко используются в работе систем транспортеров, упаковочных аппаратов и сборочных линий, а еще в составе всех видов станкового оборудования и запорной арматуры.
Также индуктивные датчики помогают контролировать мелкие и крупные элементы промышленной техники (зубцы шестеренок, стальные флажки, штампы), объекты производства (металлические изделия, листы металла, крышки) и т.п.
Кроме того, при их подключении к импульсным счетчикам можно в результате получить элементарное, но крайне эффективное считывающее устройство.
Индукционные датчики следующего поколения
Благодаря новым разработкам в этой области, были созданы усовершенствованные модели индукционных датчиков следующего поколения. Принцип работы остался прежним, однако подверглась тщательной переработке конструкция устройства.
В результате датчики теперь оснащаются тонкими платами, распечатанными на 3D-принтерах, и современной цифровой электроникой. Кроме того, их производят на гибких подложках, что избавляет от необходимости использования традиционных кабелей и разъемов.
Так что пользоваться устройствами можно даже в тяжелых погодных условиях.
К преимуществам новых разработок можно отнести следующее:
- снижение стоимости и веса, более компактные размеры;
- возможность выбора практически любых форм-факторов;
- повышение точности реагирования на металлические объекты;
- возможность проведения замеров, связанных со сложной геометрией, в двух или трех измерениях;
- упрощение конструкции;
- возможность устанавливать несколько индукционных датчиков близко друг к другу из-за высокой электромагнитной совместимости.
Все это позволило увеличить эффективность и доступность устройства, а также расширить сферу его применения.
Имитатор индуктивного датчика системы зажигания мотоцикла
Я долго думал, стоит ли писать эту статью. Настолько все выглядит очевидным и простым, даже банальным, с моей точки зрения. Но поговорив с немного с коллегами и знакомыми понял, что все таки есть люди, для которых затрагиваемые в статье вопросы интересны и выглядят вовсе не такими простыми. Поэтому все таки решил написать.
Возможно, часть статьи окажется интересной мотоциклистам, а часть электронщикам.
История вопроса
Я далек от мира мотоциклов. Но у меня есть коллеги и знакомые мотоциклисты. Сразу отмечу, что коллеги и знакомые совсем не обязательно являются специалистами в областях электроники и программирования. И вот не так давно один знакомый обратился ко мне с просьбой сделать какой-нибудь простой имитатор индуктивного датчика для системы зажигания мотоциклов.
Я удивился, что же тут сложного? Наверняка хватит самого простого генератора импульсов. Как оказалось, не все так просто. Поэтому ко мне и обратились. Но давайте обо всем по порядку.
Пациент
Имитатор был нужен для диагностики и ремонта систем зажигания мотоциклов. В идеале, самых разных мотоциклов, чем больше, тем лучше. Но для начала они хотели разобраться с одним конкретным мотоциклом — Yamaha Virago. Более точное название модели просто не знаю. Но он был довольно старым, лет 20-30, с их слов.
И у этого мотоцикла был старый же вариант системы зажигания, с одним индуктивным датчиком. В этом и была проблема. Новый блок зажигания найти было можно, но он был новой модификации, с двумя индуктивными датчиками, и не подходил для замены старой модификации.
Ситуация проясняется
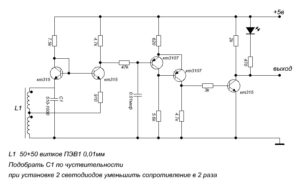
Я попросил показать мне блок зажигания этого мотоцикла. Вот он, вид изнутри
Блок зажигания мотоцикла. Фото не мое, снимали знакомые.
Видно, что блок кто то уже ремонтировал, так транзистор КТ819 (внизу справа) установлен явно не на заводе изготовителе. Кто его поставил, неизвестно. Говорят, так было сразу.
Хорошо видно микроконтроллер MH63B01V1P, никакой информации по которому найти не удалось. Скорее всего это какая то заказная микросхема. Она много где упоминается в обсуждениях блоков зажигания, в том числе, автомобилей, но кроме фотографий и названия больше ничего нет.
Ниже микроконтроллера виден субмодуль выполненный на керамической подложке.
Знакомые хотели сами разобраться с ремонтом блока. Но им был нужен имитатор датчика, что бы можно было работать на столе вдали от мотоцикла.
Как все это устроено
Как работают систем зажигания, думаю, известно почти всем. Однако, для мотоциклов (по крайне мере, для части из них) есть некоторые особенности в их построении.
Для тех, кто раньше не сталкивался (как и я до этого случая) с подобными системами, нужно кратко пояснить, как там все устроено и работает. Для иллюстрации буду использовать тот самый Yamaha Virago.
На других мотоциклах с подобной системой зажигания внешний вид и некоторые детали могут отличаться, но сам принцип останется тем же самым.Датчик системы зажигания индуктивный. Представляет из себя катушку с магнитным сердечником. Намагничен или сам сердечник, или внутри датчика расположен постоянный магнит. На самом деле довольно стандартное исполнение подобных индуктивных датчиков. Индуктивность датчика не замерялась. Сопротивление обмотки порядка 200 Ом.
На роторе генератора, изготовленном из алюминиевого сплава, есть две накладки из железа (стали). Вот так это выглядит в реальности
Ротор генератора с накладками для датчика системы зажигания. Фото не мое, снимали знакомые
Сам ротор генератора жестко крепится на коленвале. При вращении ротора во время работы двигателя эти накладки проходят под датчиком вызывая изменение магнитного поля в его сердечнике. А это, в свою очередь, приводит к возникновению ЭДС в катушке датчика.
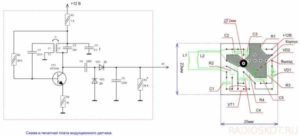
Схематически это можно представить так. Направление вращения я показал условно, оно не столь важно в данном случае.
Расположение датчика системы зажигания на мотоцикле. Иллюстрация моя
В новом варианте, который я упоминал ранее, накладка на роторе одна, но установлено два датчика разнесенных на некоторый угол.
Как все это работает
Работает все это довольно просто. На выводах датчика формируется импульс напряжения во время прохождения края накладки под сердечником. Вот так, упрощенно, выглядит сигнал с датчика при прохождении накладки
Форма сигнала с датчика системы зажигания мотоцикла.
Иллюстрация моя
Полярность импульсов напряжения зависит от полярности намагниченности сердечника датчика (или встроенного магнита) и подключения выводов датчика.
Если выводы датчика поменять местами, то сменится и полярность импульсов. Но для данного мотоцикла датчик подключен так, что полярность импульсов соответствует показанной на рисунке.
А вот фотография с экрана осциллографа во время прокрутки двигателя стартером. Снимал не я.
Осциллограмма сигнала с датчика во время прокрутки двигателя стартером. Фото не мое, снимали знакомые
Амплитуда как положительных, так и отрицательных импульсов порядка 4В, в среднем. Если нарисовать упрощенную временную диаграмму, То получится примерно так
Временная диаграмма сигнала с датчика зажигания. Иллюстрация моя.
Хорошо видно, что импульсы идут парами. На каждый оборот коленвала приходится по две пары импульсов, так накладки две. Интервал 4 мс соответствует небольшому расстоянию между накладками. 40 мс это время прохождения накладки через датчик. А один оборот коленвала занимает 200 мс.
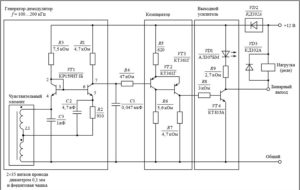
Усилитель-формирователь в блоке зажигания формирует из импульсов датчика прямоугольные импульсы, которые соответствуют прохождению накладок под датчиком. Далее, импульсы поступают на микроконтроллер, который распределяет их по транзисторным ключам коммутирующим катушки зажигания
Работа усилителя-формирователя и микроконтроллера. Иллюстрация моя.
Хорошо видно, что по положительному импульсу первичная обмотка катушки зажигания подключается к аккумулятору и начинается накопление энергии в ее магнитном поле. По отрицательному импульсу катушка отключается от аккумулятора и на ее вторичной обмотке формируется высоковольтный импульс.
Той самой особенностью, о которой я говорил ранее, является задание времени накопления энергии размером накладки (ее длиной). Точнее, это время зависит от времени прохождения накладки под датчиком.
И оно тем меньше, чем выше обороты двигателя.
Другой особенностью является то, что ротор генератора закреплен на коленвале жестко, поэтому изменением угла опережения зажигания занимается микроконтроллер и этот угол зависит только от оборотов двигателя.
Имитатор
Вот теперь можно переходить собственно к поставленной задаче — имитации работы датчика системы зажигания. Для обратившегося ко мне знакомого основную сложность представляли именно двухполярные импульсы. И их парность. Но на самом деле тут все довольно просто.
Точное соблюдение временных интервалов не столь существенно для проверки и ремонта блоков зажигания. Но примерные временные соотношения соблюдать смысл имеет.
Будем имитировать поведение максимально близкое к наблюдаемому на осциллограмме. Нет, никаких механических имитаторов не будет, хотя, со слов знакомого, такие делают. И никаких индуктивных элементов тоже не будет. Мы воспользуемся обычной дифференцирующей цепочкой из конденсатора и резистора. Это настолько банально, что даже неудобно об этом писать…
Формирование импульсов дифференцирующей RC цепью. Иллюстрация моя.
Резистор 200 Ом соответствует сопротивлению обмотки датчика.
На тот случай, если это будет иметь значение для блока зажигания (на тот момент схему блока зажигания я еще не разрисовывал). Емкость конденсатора 4.
7 мкФ позволяет получить длительность импульса примерно соответствующую осциллограмме снятой на мотоцикле. Амплитуда прямоугольного импульса 5 В, это многовато, но это мы поправим.
У нас должно быть два прямоугольных импульса длительностью 40 мс с паузой около 4 мс между ними. Пауза между парами импульсов должна быть порядка 120 мс (200-40-4-40).
Это можно сделать используя таймеры NE555 или одновибраторы, но получится громоздко. Поэтому я решил использовать простенький микроконтроллер PIC10F200. Он дешевый и в удобном корпусе SOT23-6.И эти микроконтроллеры у меня есть в большом количестве, остались от старого проекта.
Те, кто читает мои статьи уже наверняка задумались. Где то, и совсем недавно, они уже что то подобное слышали. Да, именно об этом имитаторе я упоминал в статье Ошибки допускают все. Исключений не бывает.
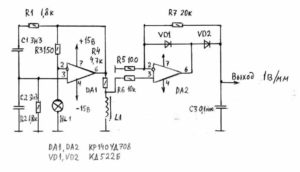
Схема имитатора получилась очень простой
Схема имитатора датчика зажигания мотоцикла. Схема моя.
Здесь резистор R1 немного снижает амплитуду импульсов.
А микросхема NC7WZ04P6X в удобном корпусе SC70-6 это просто быстрый сдвоенный инвертор с выходным током до 50 мА (не более 100 мА в целом на микросхему). Она обеспечивает развязку выхода имитатора от микроконтроллера.
Конденсатор С5 использовался керамический, но можно взять и обычных электролитический (полярный). В этом случае его положительный вывод подключают к выходу микросхемы.
Микроконтроллер формирует, программно, на выводе GP2 импульсную последовательность
Генерируемый микроконтроллером сигнал
временные параметры которой уже упоминались ранее. Микросхема DD2 инвертирует этот сигнал и на выходе имитатора получаем такой сигнал
Генерируемый имитатором сигнал. Фото с экрана осциллографа.
Извиняюсь за качество, фото делалось телефоном для отправки знакомому по WhatsApp. Сейчас имитатор уже не у меня, поэтому сохранить качественную копию экрана в файл уже не могу.
Да, форма импульсов отличается, но это не важно, в данном случае. И, как показала проверка, усилитель-формирователь в блоке зажигания корректно формировал прямоугольные импульсы из сигнала с имитатора.